捕获的基本概念
GNSS接收机的数字部分要完成跟踪和解码工作,就必须将自己所接收到的卫星信号与其他不同的卫星信号中区分出来,而卫星信号捕获电路便是实现这一功能的模块电路。总的来说,信号捕获需要完成以下三个功能:1.识别出所接收的卫星信号所采用的伪码从而实现卫星区分。2.从接收到的卫星信号中提取出信号传输过程中的多普勒频偏的估计值。3.从接收到的卫星信号中得到其伪码与本地伪码之间的初步码相位差值。由此可见,捕获其实是一个二维搜索过程,不仅要搜索伪码相位,还要搜索多普勒频移。即捕获的目的是确定能够观测到的卫星,并且估计出粗略的码相位和载波多普勒频移。
捕获其实就是一个粗略估计参量的操作,它可以理解成一个卫星-载波-伪码的三维搜索过程。大体上讲就是在本地复制一个信号,不断变化这个副本,并与接收到的信号作比较,直到满足相似度要求为止。而副本信号变化的依据是捕获算法,也就是它有自己的一套内在规律,譬如我们设定一个“+1律”,那么信号频率就会从0开始,每次增加1Hz,直至相关器的输出功率超过捕获门限,退出循环。
追踪的基本概念
GNSS 信号捕获实现的只是粗同步,当捕获到某颗导航卫星的信号后,由于卫星一直处于运动状态,多普勒效应会引起载波频率发生动态偏移,同时C/A码的相位也会随着卫星与接收机之间距离的变化而改变,所以GNSS 卫星信号一直在动态变化中。
因此必须动态的跟踪载波多普勒频移和码相位的变化,才能保证捕获到卫星信号之后持续、准确地获得导航电文,进而完成导航定位解算。信号跟踪环路通常包含鉴别器、环路滤波器以及压控振荡器三个主要部分,如下图所示。鉴别器比较输入信号和压控振荡器输出信号,输出一个随误差变化的误差电压,通过环路滤波器平滑后送到压控振荡器里是使误差减小,直至误差越来越小。
信号跟踪分为载波跟踪和码跟踪两部分。完整的 GNSS 信号跟踪环路如下图所示: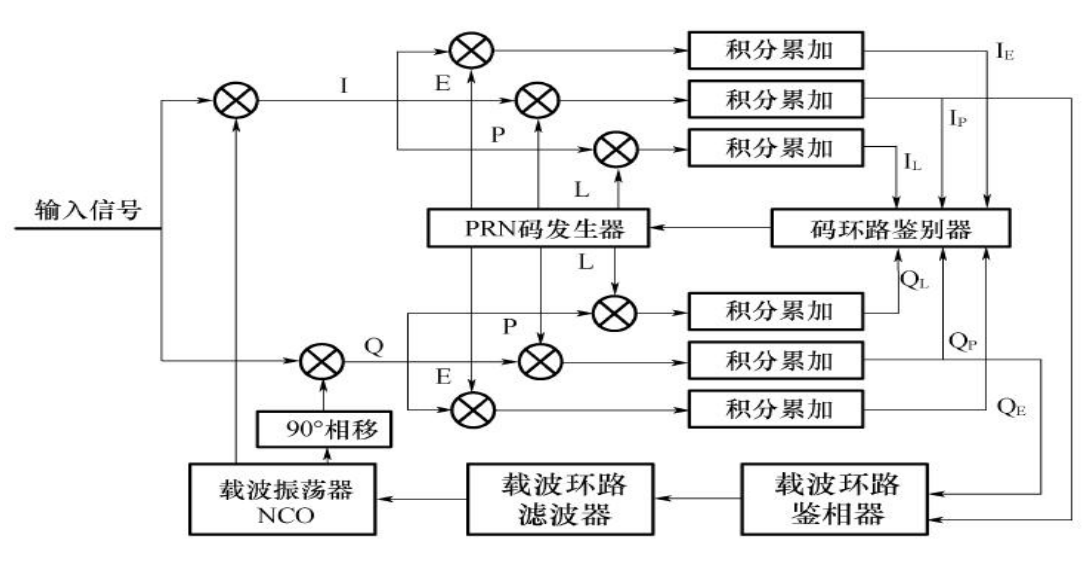
载波跟踪对载波相位和多普勒频移更精确的估计,使本地载波和接收到的信号载波能够更加精确的同步(包括频率和初始相位的同步),有载波频率跟踪和载波相位跟踪两种。根据鉴别器提取信号误差控制量的不同方法,载波环路通常采用如下类型:锁相环(PLL)、锁频环(FLL)。FLL 鉴别器输出的是频率误差,PLL 鉴别器输出的是相位误差,比 FLL 更加精确。 码跟踪环路是为了提高本地码和接收到的卫星信号扩频码之间的相关程度,完成对扩频码的解扩,来得到准确的导航数据。码跟踪环路采用超前-即时-滞后跟踪的延迟琐定环(DLL),输入信号与三个本地 PRN 码进行相关。